Как сделать дрон своими руками
В этой статье поговорим о том, как своими руками собрать полностью автономный дрон. Наш аппарат будет оборудован GPS, он будет уметь летать по заданной траектории и координатам и выполнять большое количество различных полетных заданий. Мы продемонстрируем процесс сборки летательного аппарата, готового к полету и выполнению миссий.
Перед попыткой выполнить инструкции данной статьи убедитесь в том, что в вашей стране не действуют запреты на покупку и хранение запчастей для дронов, а также сборку и запуск таковых. Пожалуйста, ознакомьтесь с законодательством, связанным с использованием самодельных беспилотных летательных аппаратов по месту проживания.
Комплектующие
Для сборки нам понадобятся следующие запчасти:








Контроллер SpeedyBee F405 V3 изначально разрабатывался для полетов, управляемых при помощи пульта. И прошивка по умолчанию от Ardupilot тоже на это рассчитана. Однако мы немного изменим ее в процессе настройки квадрокоптера, что даст нам возможность подключить модуль телеметрии и сделать беспилотник полностью автономным и принимать все команды от компьютера.
Двигатели, которые мы рекомендуем, отличаются от тех, что используются в этой статье. Первая версия этого дрона собрана именно на Racerstar. Просто у нас не оказалось под рукой таких же и решено было продемонстрировать на похожих. Они сделали наш дрон на 50 граммов тяжелее предыдущего, что, естественно, скажется на длительности полетов.
Инструменты
Ниже приведен необходимый набор инструментов:

 |
 |

Сборка: часть первая
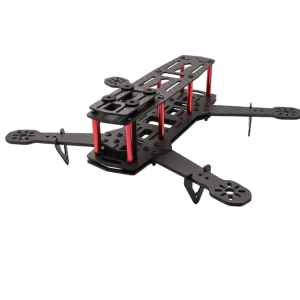
Для начала необходимо собрать часть нижнего этажа рамы, прикрутив красные стойки, как показано на картинке:

Как будет видно на изображениях ниже, я зыбыл это сделать в самом начале и поплатился тем, что в конце пришлось перебрать раму заново.
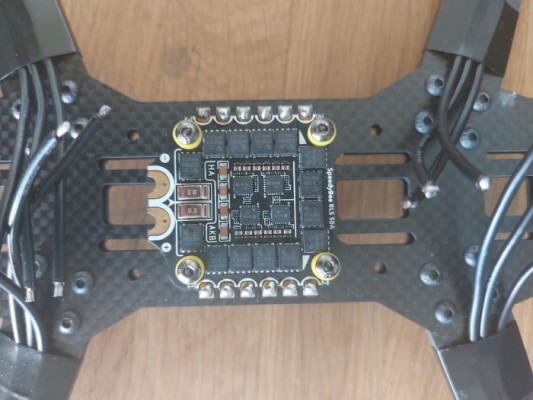
Соберите до конца первый этаж, и обязательно установите на него плату распределения питания по центру, затем закрепите болтами из набора для полетного контроллера. Далее, поочередно прикрутите все двигатели, обмотайте изолетнтой их провода у основания рамы, так чтобы не болтались. После этого отмерьте длину проводов, достаточную для того, чтобы быть последовательно припаянной к контактам платы распределения и отрежьте*. Затем, оголите кончики проводов, чтобы подготовить их к лужению.

* Будьте предельно осторожны и не старайтесь с первого раз найти идеальную длину проводов. Лучше отрезать с небольшим запасом, так как он не будет сильно мешать. А вот слишком короткие провода наращивать достаточно сложно. Также, не стоит выбрасывать обрезки. В будущем они могут пригодиться, если понадобится собрать дрон побольше на этих же моторах.
Пайка
Плата распределения питания
В первую очередь произведем пайку* проводов моторов, проводов** подключения источника питания к плате распределения, а также конденсатора***.
Выполните пайку в соответствии со схемой на изображении:
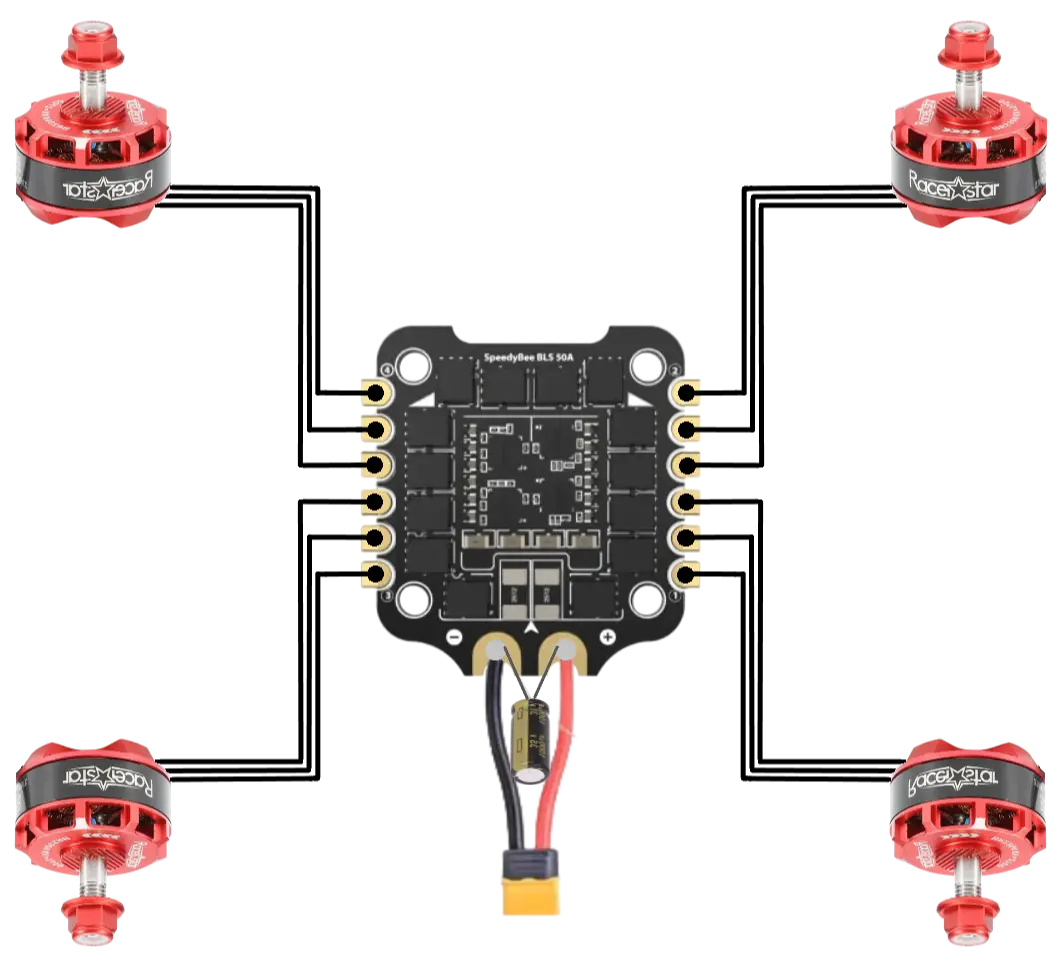
* Не забудьте залудить контакты перед пайкой: покройте флюсом место пайки, затем расплавьте припой и нанесите его поверх флюса, чтобы образовалась круглая горка, достаточная для того, чтобы к ней надежно закрепился провод. Повторите то же самое с проводами, чтобы они "впитали" достаточно припоя. Только после этого производите пайку первого ко второму.
** Красный провод источника питания должен быть припаян к знаку "+", черный - к знаку "-".
*** Конденсатор необходим для сглаживания скачков напряжения, подаваемого на плату от источника. У конденсатора 2 полюса. Традиционно более длинный провод соответствует знаку "+", но для удобства пайки его лучше укоротить. Не забудьте перед началом пайки конденсатора надеть термоусодочные трубки, поставляемые в комплекте, на контакты.
После пайки все места, где она производилась, необходимо покрыть специальным изолирующим лаком и оставить сохнуть на время, указанное производителем лака. Для надежности, можно сделать это 2 раза с промежутком в 30-60 минут.
Полетный контроллер
Далее, нам потребуется припаять провода модема* и GPS модуля** к полетному контроллеру.
Пайка должна соответствовать следующей схеме:
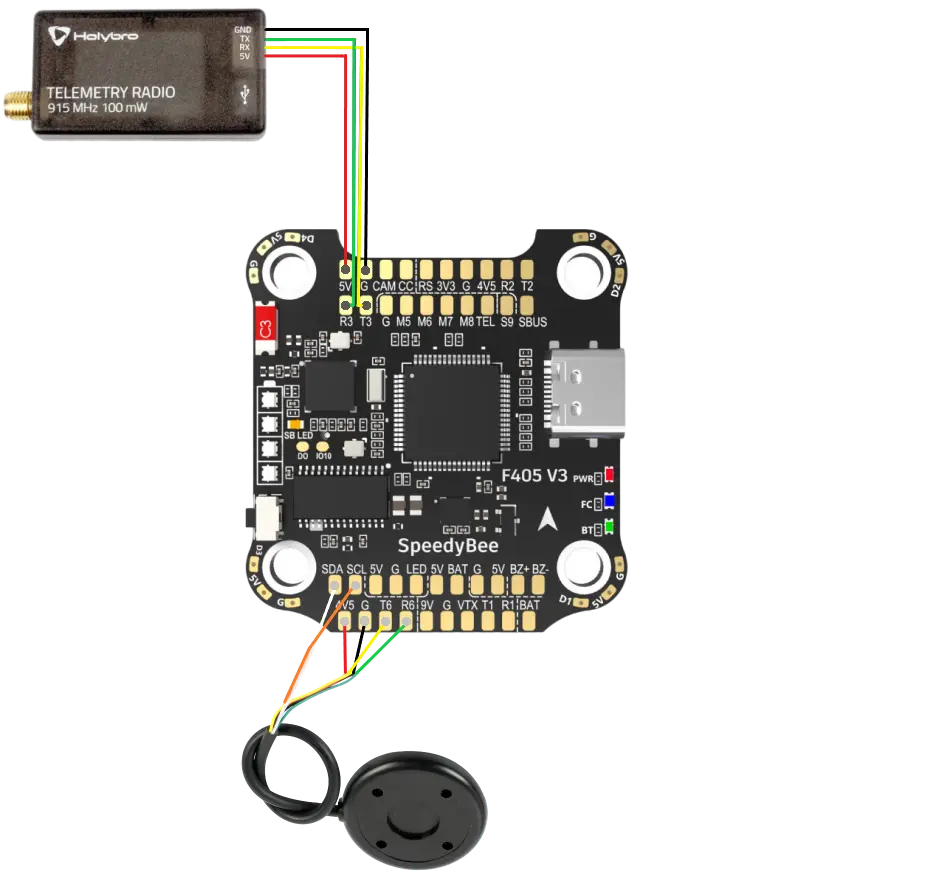
* От модема отходят 6 проводов. На нашем контроллере для RTS и CTS нет интерфейса, поэтому паять будем только оставшиеся 4, а RTS/CTS можно вытащить для эстетичности. Выбрасывать их не стоит - могут пригодиться в будущем если решите перейти на другой полетный контроллер. Следуйте инструкции ниже. Если вы правша, то паять проще в таком же порядке.
- 5V -> 5V
- Gnd -> G
- TX -> R3
- RX -> T3
- RTS - не припаиваем
- CTS - не припаиваем
Обратите внимание на то, что контакты "Tx" (Transmit) от модема/GPS-модуля припаиваются к контактам "Rx" (Receive) на контроллере. Также, необходимо строго соблюдать нумерацию "Т" и "R", так как наш контроллер будет запрограммирован на отправку и прием сигналов именно по этим конкретным каналам.
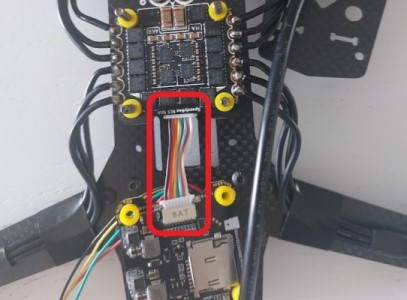
** Перед пайкой GPS-модуля необходимо укоротить провод до длины примерно равной длине верхней крышки рамы квадрокоптера. Также, до начала пайки нужно протянуть провод через отверстие крышки, как показано на картинке:

От GPS модуля отходит 2 группы проводов:
- UART + power - 4 провода: Tx, Rx, GND, 5V
- I2C - 2 провода: SCL, SDA
Паять следует по той же логике, что и с модемом. Если вы правша, то проще соблюдать порядок ниже:
- SDA->SDA
- SCL->SCL
- Gnd->G
- 5V->4V5
- Tx->R6
- Rx->T6
После пайки все места, где она производилась, необходимо покрыть специальным изолирующим лаком и оставить сохнуть на время, указанное производителем лака. Для надежности, можно сделать это 2 раза с промежутком в 30-60 минут.
Сборка: часть вторая
Соедините плату распределения питания с платой полетного контроллера при момощи 8-контактного провода из комплекта:
Установите контроллер поверх платы распределения и закрутите пластмассовыми гайками из комплекта. Если вы все сделали правильно, то стрелка на плате полетного контроллера должна указывать вперед - в сторону, противоположную от провода для источника питания.
Сборка: часть третья
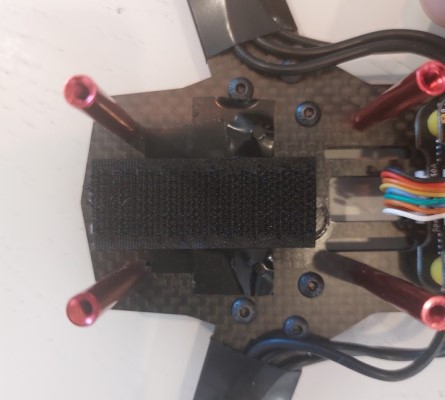
Теперь нужно закрепить модем на первом этаже рамы квадрокоптера в передней ее части. По желанию, можно использовать липучку, двусторонний скотч или изоленту, как кому нравится. Я для надежности использовал 2 варианта: сначала приклеил липучку, затем, после установки, замотал модуль изолентой. Так я могу быть уверен, что в случае вибраций, модуль не оторвется и мой дрон не потеряет связь с НСУ.
Не забудьте перед установкой подсоединить кабель, связывающий контроллер с модемом, а также прикрутить антенну к модему. На этом сборка первого этажа нашего дрона закончена.

Ни в коем случае не подавайте питание на модем, пока не убедитесь, что к нему прикручена антенна. Иначе он очень быстро выйдет из строя.
Сборка: часть четвертая
Нам необходимо установить штатив GPS-модуля на верхнюю крышку рамы, через которую мы продевали кабель. Модуль должен обязательно стоять на таком штативе, так как в нем находится еще и компас. Поднимая его над всей конструкцией мы избегаем влияния магнитного поля от электродвигателей. Если этого не сделать, сигнал от компаса будет неверным.
Нам также потребуется укоротить стойку штатива в 2 раза и заново сточить конец стойки со стороны, где был произведен срез. Учитывая то, что штатив итак стоит на втором этаже коптера, растояния должно быть достаточно. К тому же GPS-модуль будет подвергаться меньшей амплитуде при вибрации дрона, а также это сделает наш аппарат красивее.
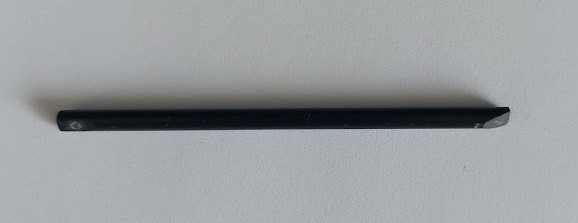
Результат после всех манипуляций должен выглядеть примерно так:

Прикрутите верхнюю крышку к металическим стойкам красного цвета, не трогая пока 2 задние стойки - там где у нас находится кабель источника питания. Установите на место задних стоек штатив для GPS-модуля. У штатива 4 места для крепления, но нам понадобится только 2 из них, так как на этой раме производителем не предпологалось использование штативов UBLOX. Остальные крепления можно оставить, как есть для будущих сборок, а можно по желанию срезать.
После этого возьмите двусторонний скотч круглой формы из набора и наклейте на тарелочку штатива. А поверх скотча наклейте GPS-модуль, чтобы тот смотрел стрелкой строго вперед.

Установка пропеллеров
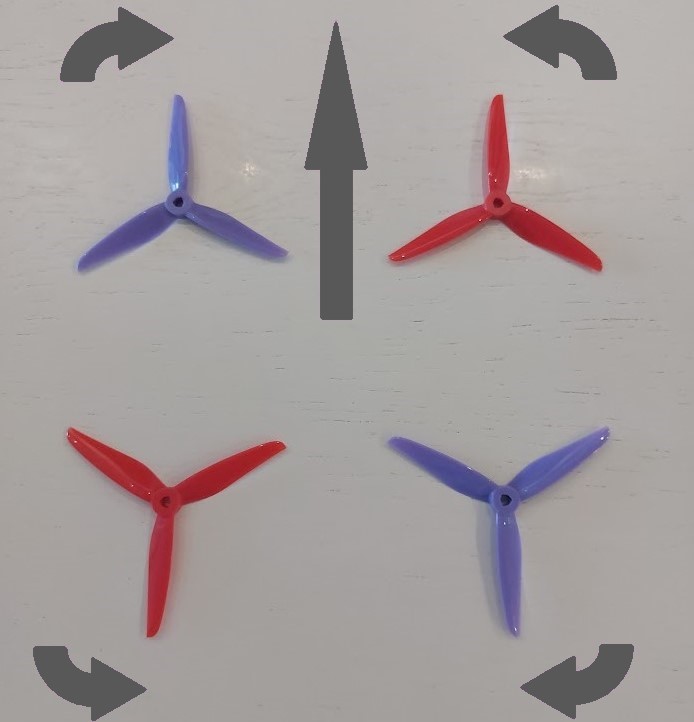
Сейчас будет продемонстрировано, как правильно установить пропеллеры на вашем квадрокоптере. Но сделано это будет лишь с целью дать вам понимание, так как начинать летать пока рано - нужно еще разобраться с прошивкой полетного контроллера и настройками. Ниже приведено изображение с направлением вращения винтов. На изображении отчетливо должно быть видно что винты справа и слева зеркальны друг другу и "гребут" внутрь спереди и сзади. Это обязательное условие, не выполнив которое, вы не сможете летать. Как вы уже догадались, разные цвета пропеллеров выбраны не случайно - это несколько облегчает процесс установки. Но это не является требованием.
Также, пока что рано устанавливать пропеллеры на ваш квадрокоптер, потому что впереди еще следуют настройки SERIAL-портов, калибровка акселлерометра, компаса и тестирвоание вращения двигателей. И все это должно быть выполнено без винтов во избежание получения травм. Винты стоит прикручивать в самый последний момент - непосредственно перед полетом.
На этом этапе сборку дрона можно считать законченой. В следующей статье, будет рассказано о том, как прошить полетный контроллер.
Дата публикации: 15.08.2024
Автор: Вальчук Александр
Интересуют беспилотники?
Мы активно разрабатываем программное обеспечение для наземного пункта управления БПЛА. Программа полезна как для бизнеса, так и для любителей БПЛА. Узнайте больше, перейдя по следующей ссылке: